 | 10 Dec 2019
| 10 Dec 2019
Combination of VLBI Intensive Sessions with GNSS for generating Low latency Earth Rotation Parameters
Hendrik Hellmers
Daniela Thaller
Mathis Bloßfeld
Alexander Kehm
Anastasiia Girdiuk
The Earth Orientation Parameters (EOPs) are published by the Earth Orientation Centre of the International Earth Rotation and Reference Systems Service (IERS). They are provided as the low-latency Bulletin A and the 30 d latency long-term EOP time series IERS 14 C04. The EOPs are a combined product derived from different geodetic space techniques, namely Global Navigation Satellite Systems (GNSS), Satellite Laser Ranging (SLR) and Lunar Laser Ranging (LLR), Doppler Orbitography and Radiopositioning Integrated by Satellite (DORIS) and Very Long Baseline Interferometry (VLBI). Since not all techniques are equally sensitive to every EOP, several parameters rely on specific observation techniques. As an example, dUT1 can only be estimated from VLBI observations. This means VLBI is an essential part of the estimation procedure for consistent EOPs.
Within this paper, we are performing a combination of two low-latency space geodetic techniques as they enable the estimation of the full set of Earth Rotation Parameters (ERPs; polar motion, dUT1 and the corresponding rates). In particular, we focus on the development of a robust combination scheme of 1 h VLBI Intensive sessions with so-called GNSS Rapid solutions on the normal equation level of the Gauß-Markov model. The aim of the study is to provide highly accurate low-latency ERPs. So far, a latency of approximately only 1–3 d cold be reached since the main limiting factor is still the latency of the input data. The mathematical background of the applied algorithm is discussed in detail and evaluated by numerical results of empirical investigations. The combination yields a numerical stabilization of the equation system as well as an improvement (reduction) of the corresponding root mean square deviation of the epoch-wise estimated parameters w.r.t. the IERS 14 C04 reference time series.
- Article
(1669 KB) - Full-text XML
- BibTeX
- EndNote





Earth Orientation Parameters (EOPs) are usually derived from the combination of the four space geodetic observation techniques Global Navigation Satellite Systems (GNSS), Satellite Laser Ranging (SLR), Doppler Orbitography Integrated by Satellites (DORIS) and Very Long Baseline Interferometry (VLBI). The official EOP time series (terrestrial pole offsets, dUT1, Length-of-Day and celestial pole offsets) is provided by the Earth Orientation Centre of the International Earth Rotation and Reference Systems Service (IERS). The Earth Rotation Parameters (ERPs; terrestrial pole offsets, dUT1, LOD) as a subset of the EOPs are published in the Bulletin A (https://www.usno.navy.mil/USNO/earth-orientation, last access: 27 November 2019) and IERS 14 C04 long term time series (Bizouard et al., 2019). Within the study presented in this paper, we developed a procedure to generate a time series of highly accurate ERPs with very low latency. Due to the focus on the low latency, we limit ourselves to a combination of GNSS and VLBI data. GNSS is sensitive to all ERPs except dUT1 whereas VLBI allows the consistent estimation of the full set of ERPs. Unlike GNSS, which is available continuously (daily), the VLBI experiments are organized 2–3 times per week as 24 h observation campaigns involving at least 2 and up to about 15 antennas. Due to the computationally costly workflow of the data analysis from the observation to the final product, the 24 h sessions entail a long latency of approximately 2–3 weeks until the analysis results (NEQs and estimated parameters) are published. To reduce this latency to 2 d or less, so-called VLBI Intensive sessions are performed on a daily basis since the early 1980s. Because of the shorter observation time interval of only 1 h and a smaller station network of 2–3 antennas, the VLBI Intensives allow a reliable estimation of dUT1 only and an accuracy level about 3 times lower compared to the 24 h VLBI sessions (Thaller and Bachmann, 2015). The VLBI Intensive accuracy level is roughly at the same level as the error propagation within the GNSS products (Steigenberger, 2014). Moreover, the latency of the VLBI Intensive data is in a better accordance with the latency of the different GNSS products which varies from 1 d for the GNSS Rapid solution to 5 d for the GNSS Final solution. In comparison with the GNSS Rapid product, however, the GNSS Final solution is advanced by introducing a stochastic model besides the parameter estimates (e.g., Thaller, 2008; Schmid, 2009; Seitz, 2009). The previous studies discuss the combination of various space geodetic techniques by different methods:
-
The combination at the observation level of the Gauß-Markov model: this approach is the most rigorous one because consolidated observations from all techniques can be weighted individually in one common adjustment.
-
The combination at the normal equation (NEQ) level: different NEQ systems are stacked (added) and a combined NEQ is inverted after datum constraints are applied. This combination is less rigorous than the combination on observation level since the single observation equation is not accessible anymore. However, if a special attention is paid to an identical parameter set-up and consistent background models, the combination on NEQ level matches the combination on the observation level closely. This approach enables a separate weighting of the pre-processed technique-specific NEQs.
-
The combination at the solution level: this approach combines parameters estimated separately from different techniques. The processing scheme is based on the solution (i.e. estimated parameters including their variance-covariance information) from different adjustments with different datum constraints, and thus, represents the least rigorous combination process.
A comparison of the combination strategies is given in, e.g., Seitz (2012) and Bloßfeld (2015). The official EOP products released by the IERS (Bulletin A and IERS 14 C04) are derived using the last approach.
Within this study, we apply the second approach (combination at NEQ level) to consistently combine VLBI and GNSS data and estimate highly accurate low-latency ERPs (i.e., a rapid ERP solution). A similar approach for the combination of these techniques has been performed by Thaller et al. (2008) for 24 h VLBI sessions, VLBI Intensives and GPS rapid solutions. The achieved level of standard deviations in the range of 20–30 µs for dUT1 over a time span of 16 months (2006–2008) encourages a further investigation of the topic within this paper. Also, the current combination by Thaller et al. (2008) exploits the second approach where NEQs of both VLBI and GNSS are used, unlike the work by Nilsson et al. (2013), where the estimates of the rapid GNSS product are adjusted in NEQs of VLBI Intensives by means of a Kalman filter. Moreover, an approach for an ultra-rapid ERP determination is given in Haas et al. (2017). For the approach in this study, a common parameterization of all EOPs in each technique-specific NEQ is required. As a consequence, in most cases the technique-specific equation system has to be set up with more parameters than would be solvable by the respective technique alone (irregular/singular NEQ). Hence, besides dUT1, the VLBI Intensive NEQs must include LOD, the terrestrial pole offsets and their rates although their sensitivity to polar motion is too small for obtaining reliable estimates (due to the very sparse network geometry). On the other hand, a parameterization of dUT1 within the GNSS NEQ is necessary although GNSS is not sensitive to dUT1 at all.
The geodetic VLBI and GNSS observations are processed at the Analysis Centres (ACs) organised within the International VLBI Service for Geodesy and Astrometry (IVS) and the International GNSS Service (IGS) of the International Association of Geodesy (IAG). All ACs provide their analysis results (NEQs and parameter estimates) in the so-called Solution Independent EXchange (SINEX) format (https://www.ccivs.bkg.bund.de/, last access: 27 November 2019). Currently, the NEQs of the 24 h VLBI sessions, the NEQs of the 1 h VLBI Intensive sessions and the NEQs of the GNSS daily solutions are available in this format. As the ACs do not yet provide SINEX files for the GNSS Rapid products, the combination performed within the present study is based on GNSS Final products provided by the European Space Agency (ESA). The accuracy level of the ESA GNSS Rapid data is expected to be at the level of the corresponding GNSS Final product (Subirana, 2013). The usage of the GNSS Rapid product is anticipated in the future to further lower the ERP product latency with moderate accuracy.
In Sect. 2, the characteristics of the VLBI Intensive sessions as well as the GNSS Final solutions are presented. Sect. 3 contains a description of the applied processing scheme. In Sect. 4, the obtained results are summarized. Finally, some problematic issues of the applied combination approach and an outlook based on the findings of this paper are provided in Sect. 5.
As pointed out above, a consistent set of ERPs can be obtained when VLBI Intensive NEQs and GNSS Rapid or Final NEQs are combined. The corresponding observations are processed by the ACs on a regular basis with a low latency. As GNSS Rapid NEQs are not yet available in SINEX format, GNSS Final NEQs have been used (Dach and Jean, 2013). In this study, we use the NEQs provided by the BKG IVS AC and the ESA IGS AC, respectively.
2.1 VLBI Intensive sessions
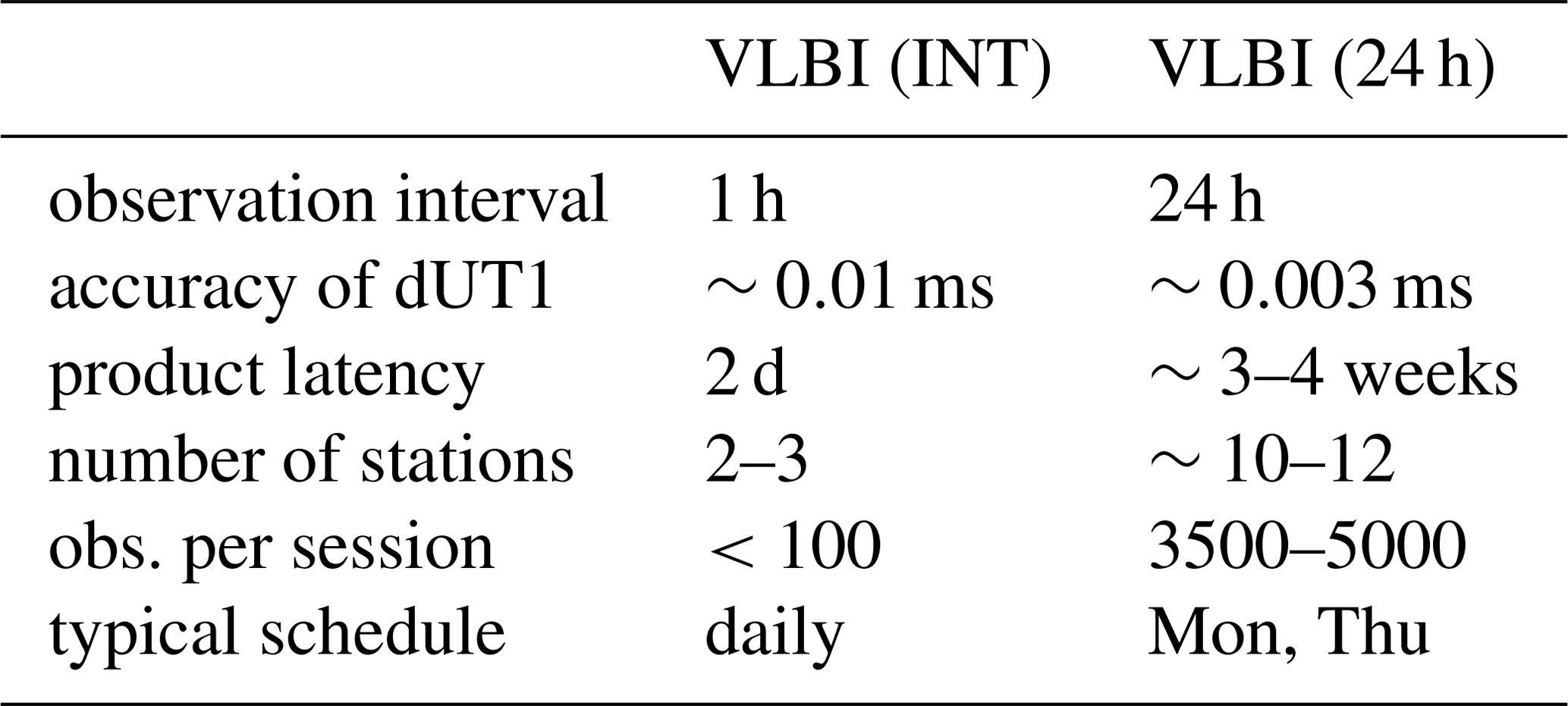
VLBI observations are organized as sessions at specific time slots of certain duration, i.e. Intensives of 1 h and other experiments of 24 h (see Table 1). VLBI Intensive sessions are daily-scheduled programs which incorporate observations of 2–3 stations whereas the 24 h sessions are typically scheduled only 2–3 times a week limited by technical issues and observation time slots at the not exclusively geodetic used antennas. An exception are the so-called IVS CONT observation campaigns where continuous 24 h sessions are scheduled over a limited 2-week period. The analysis of VLBI Intensive session observations allows to provide estimates for dUT1 within 1–2 d latency only (Nothnagel and Schnell, 2008). The average uncertainty of dUT1 estimates from VLBI Intensive sessions is 2–3 times larger than for the 24 h sessions (Table 1). The higher accuracy of 24 h sessions is achieved at the cost of their long latency, which is too long for an ERP Rapid product with a latency of several hours only. Consequently, rapid services prefer to use the Intensive sessions because of their short latency and daily observation basis. Other essential characteristics of the VLBI Intensives and 24 h VLBI sessions can be found in Table 1.
Table 1Common characteristics of VLBI Intensive and 24 h sessions (Baver et al., 2017).
The VLBI Intensives are carried out routinely using mainly three configurations (Nothnagel and Schnell, 2008) and are shown in Fig. 1:
-
INT1: Monday to Friday (06:30–07:30 p.m.): Kokee Park (USA) – Wettzell (GER)
-
INT2: Saturday to Sunday (07:30–08:30 a.m.): Tsukuba/Ishioka (JPN) – Wettzell (GER)
-
INT3: Monday (07:00–08:00 a.m.): Ny-Alesund (NOR) – Ishioka (JPN) – Wettzell (GER)
Due to antenna maintenance issues these networks were modified by replacing Tsukuba with Ishioka in January 2017. The corresponding baselines are illustrated in Fig. 1 (http://www.freeworldmaps.net/de/weltkarten/weltkarte-zweifarbig.jpg, last access: 27 May 2019).

Figure 1Three different network configurations of VLBI Intensive sessions.
A long baseline in east-west direction ensures a reliable estimation of dUT1 (Dermanis and Mueller, 1978). Baselines between Kokee Park and Wettzell or Wettzell and Tsukuba/Ishioka fulfill this requirement in the Intensive sessions. If a single-technique solution of a VLBI Intensive session containing the full set of ERPs shall be computed, the following constraints must be applied (Leek, 2014):
-
All ERPs other than dUT1 have to be constrained or fixed to their a priori values for estimating reliable dUT1 variations (the corresponding NEQs include the parameterisation af all ERPs).
-
Station-specific parameters, i.e., the tropospheric path delays in zenith direction and clock polynomials up to degree two (w.r.t. one reference station) are estimated. The remaining parameters are fixed to their a priori values (including station and source positions).
The number of observation equations in any VLBI session mainly depends on the number of contributing antennas. On average, observations of two antennas allow to collect about 20 observation equations. This small number and weak network geometry limit the estimated parameter space as described above. As a consequence, the applied a priori values for the ERP and the terrestrial and the celestial reference frames play a crucial role in the analysis of Intensive sessions since no corrections can be estimated without prior applied constraints.
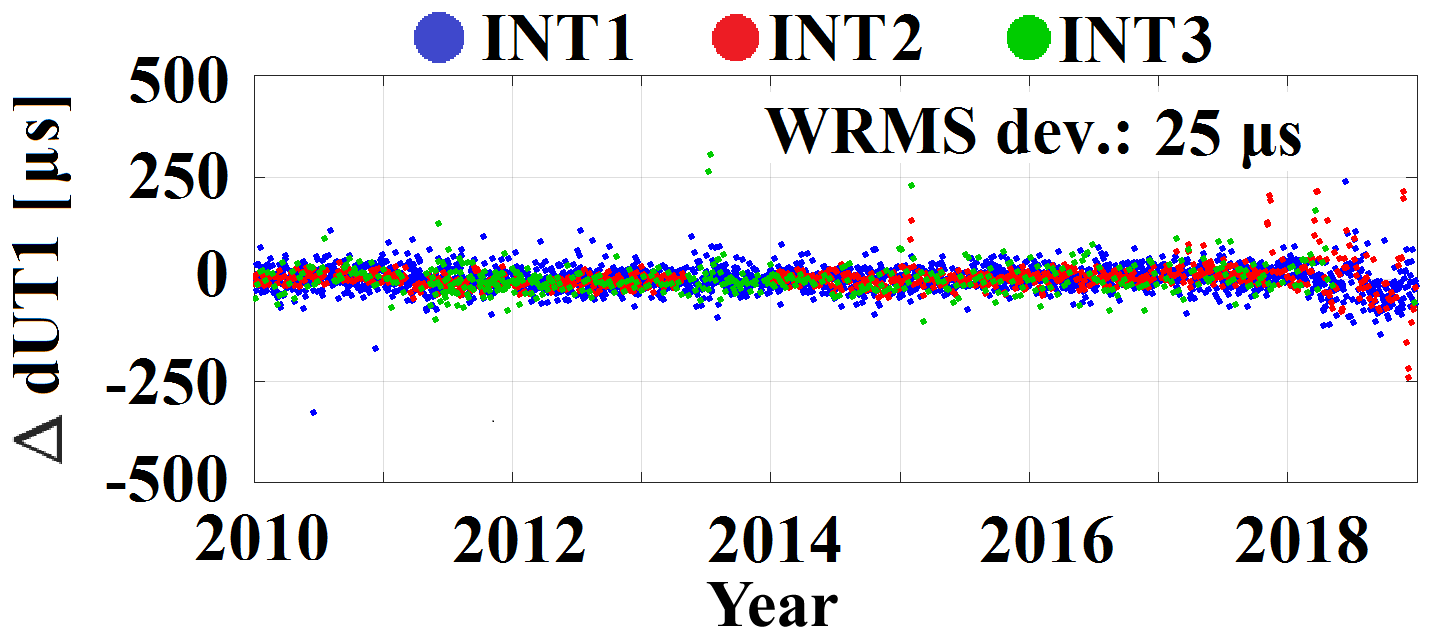
Figure 2dUT1 estimation from different VLBI Intensive sessions w.r.t. IERS 14 C04 (2010–2018).
As VLBI input, the VLBI Intensive products computed by the BKG IVS AC are used. BKG SINEX files include NEQs containing station coordinates, ERPs and their derivatives. Both the tropospheric parameters and the clock polynomials are pre-eliminated after the data evaluation w.r.t. the BKG analysis center procedure (Thorandt et al., 2017), so they are not included in the SINEX files anymore. In order to obtain dUT1 estimates from the VLBI Intensive NEQs only, all other included parameters are constrained (fixed) to their corresponding a priori values (using a minimal standard deviation). The estimated dUT1 corrections are related to the predicted dUT1 time series provided via USNO finals (Bulletin A). The majority of their differences w.r.t. the IERS 14 C04 time series (Fig. 2) are between ±30 µs in the time span from 2010 until the end of 2017. After 2017, an increased scatter w.r.t. the officially provided dUT1 reference time series is present in all three Intensive configurations. This effect can be explained by the fact that within the analysis of the VLBI Intensives, Bulletin A values are used as predicted ERPs (IERS Rapid Service/Prediction Centre, 2019) even though their uncertainties are larger than those provided by the combined IERS 14 C04 time series. This fact shows the advantage of the presented combination approach, where low-latency ERPs are directly estimated.
Further comparisons of the obtained dUT1 estimates with the reference time series IERS 14 C04 are based on the Weighted Root Mean Square (WRMS) deviation:
where and are the reference and the estimated value at epoch i and the weighting factor is determined by the reciprocal value of the calculated variance: .
This evaluation tool requires that both time series are available at equal epochs. First, the IERS 14 C04 values are converted to the epochs of the obtained dUT1 estimates. Then, the piece-wise linear interpolation is applied to dUT1 time series in which sub-daily variations have been reduced (Petit and Luzum, 2010).
Table 2Comparison of the VLBI Intensive dUT1 estimates with IERS 14 C04 series: WRMS deviation of residuals.
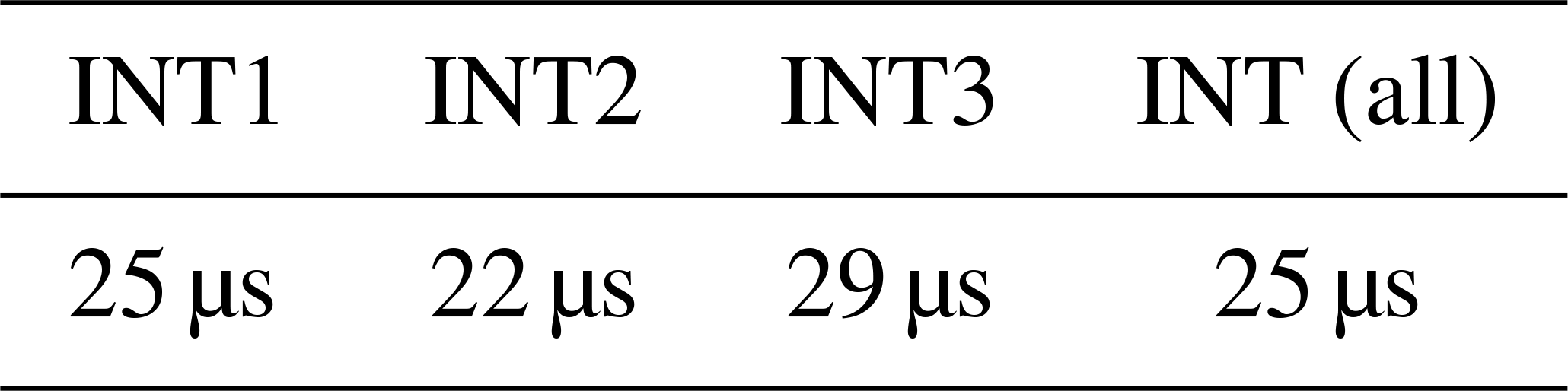
Table 2 shows the WRMS deviations of the dUT1 estimates in the range of 20–30 µs for each configuration. The accuracy of the dUT1 estimates depends on the scheduling and the specific station configuration. INT1 is scheduled five times, INT2 twice and INT3 once a week. Even though INT3 estimates are more accurate per single session than the others, the INT1 and INT2 WRMS deviations are slightly smaller than those of INT3. A few outliers in the INT3 estimates might be down-weighted in the longer time series to resume the INT3 advantages.
2.2 GNSS Finals
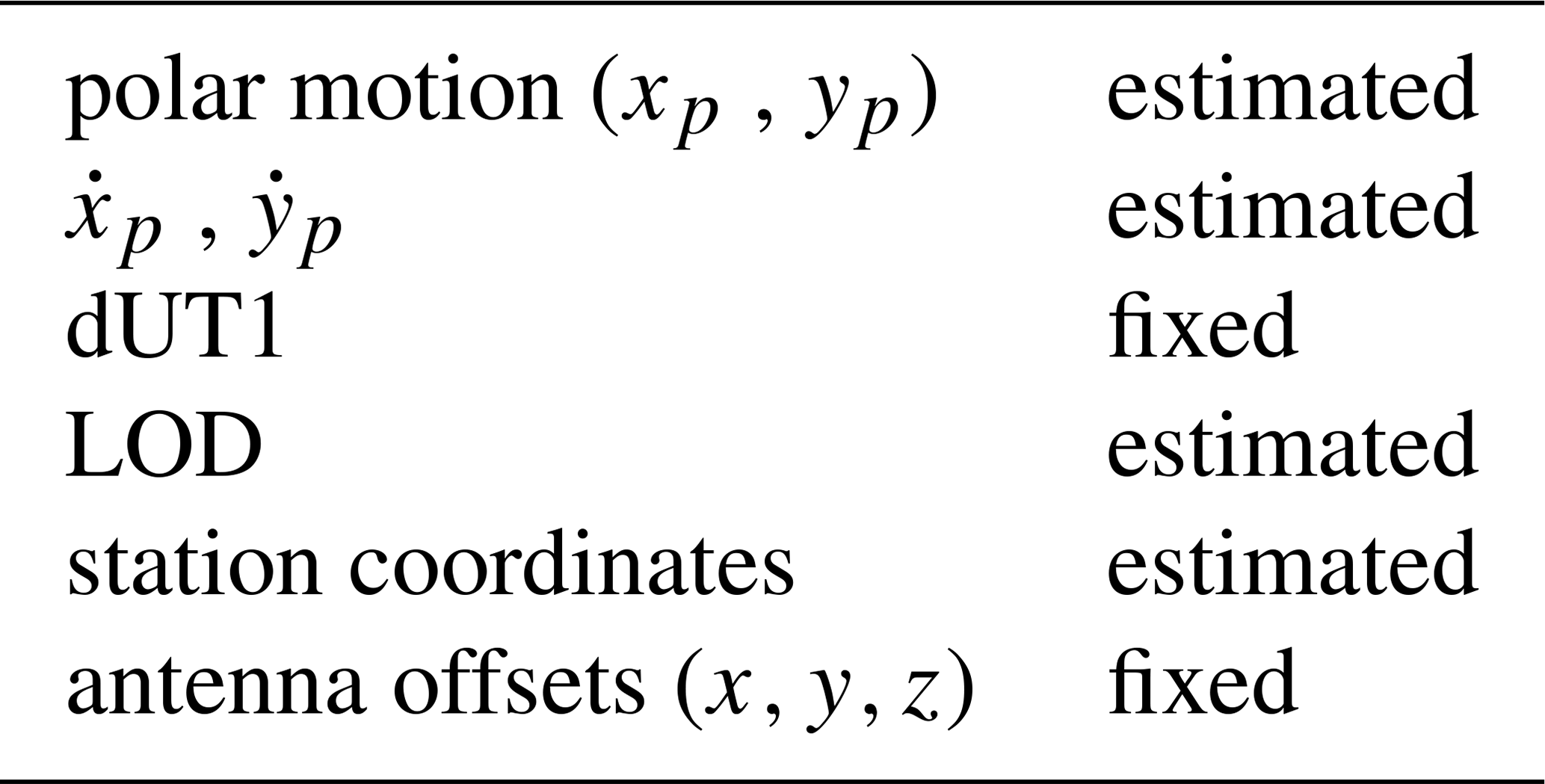
The ability of GNSS to determine the terrestrial pole offsets together with LOD is complementary to the dUT1 estimates based on VLBI Intensives. GNSS delivers polar motion with uncertainties in the range of 20–30 µas (Bizouard et al., 2017), which is better than any other geodetic observing system (24 h VLBI sessions as well as SLR and DORIS, if included in the combination). In this study GNSS Finals provided by ESA are used, as no GNSS Rapid SINEX files with all parameters necessary for the combination are available (Villiger and Dach, 2018). The final solution is based on 150 globally distributed IGS stations and about 53 GPS and GLONASS satellites. Solutions include estimated orbits, satellite and station clock parameters as well as daily ERPs and their corresponding rates. The dUT1 offset is included in the NEQ system although the sensitivity to dUT1 is too small for obtaining reliable estimates. Table 3 shows a summary of the fixed and estimated parameters in the ESA GNSS Final product released via SINEX files.
Table 3Fixed and estimated parameters within ESA's GNSS Final products.
Orbits and clocks are reduced from the equation system and released in separate files. The latency of the final products is about 5 d after the last observation. As mentioned above, GNSS Rapid solutions are available with a latency of 5 h only. Compared to GNSS Final solutions, GNSS Rapid solutions are based on a reduced network of about 110 stations but the identical satellite constellation. However, state-of-the-art GNSS Rapid solutions and GNSS Final solutions are of comparable quality (Subirana, 2013).
In this study, observations between 2010 and the end of 2018 are used to generate a continuous time series of single-technique solutions in order to assess the applied combination method. Furthermore, VLBI and GNSS NEQs are combined in order to estimate a reliable set of ERPs in one common adjustment.
3.1 Dataset review
The number of VLBI (per Intensive session) and GNSS observations (per day) is shown in Fig. 3. The largest VLBI Intensive network configuration is used in INT3 which also supports a larger amount of observations compared to INT1 and INT2, because its network is designed for observations on at least 3 stations (except short periods with only 2 stations e.g., end of 2013). The exceeding number of GNSS observations illustrates the advantage of the continuous GNSS program compared to regular VLBI sessions. The high number of GNSS stations leads to the large amount of observations. The jump in the lower panel of Fig. 3 indicates the extension of the GNSS tracking network in 2015.
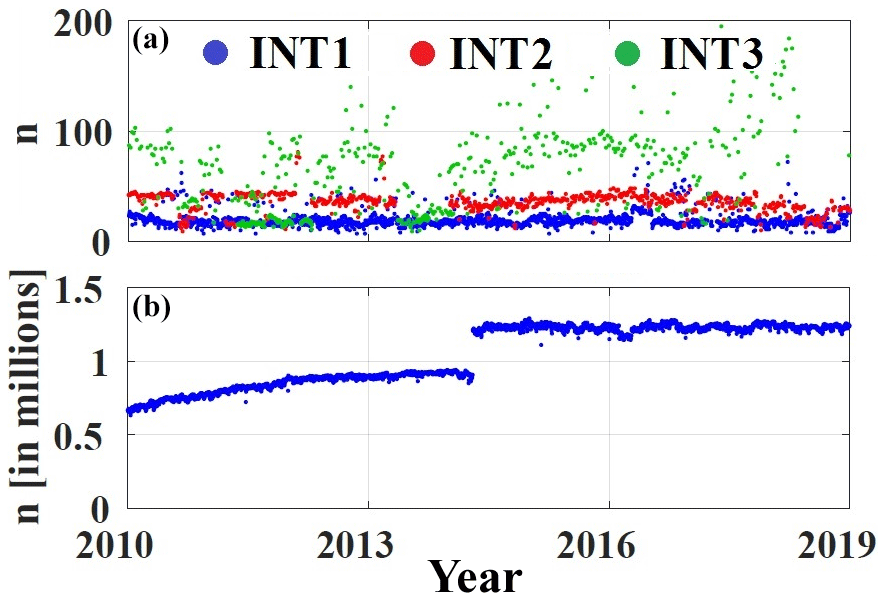
Figure 3Total number of observations in different types of VLBI Intensive sessions (a) and GNSS solutions (b).
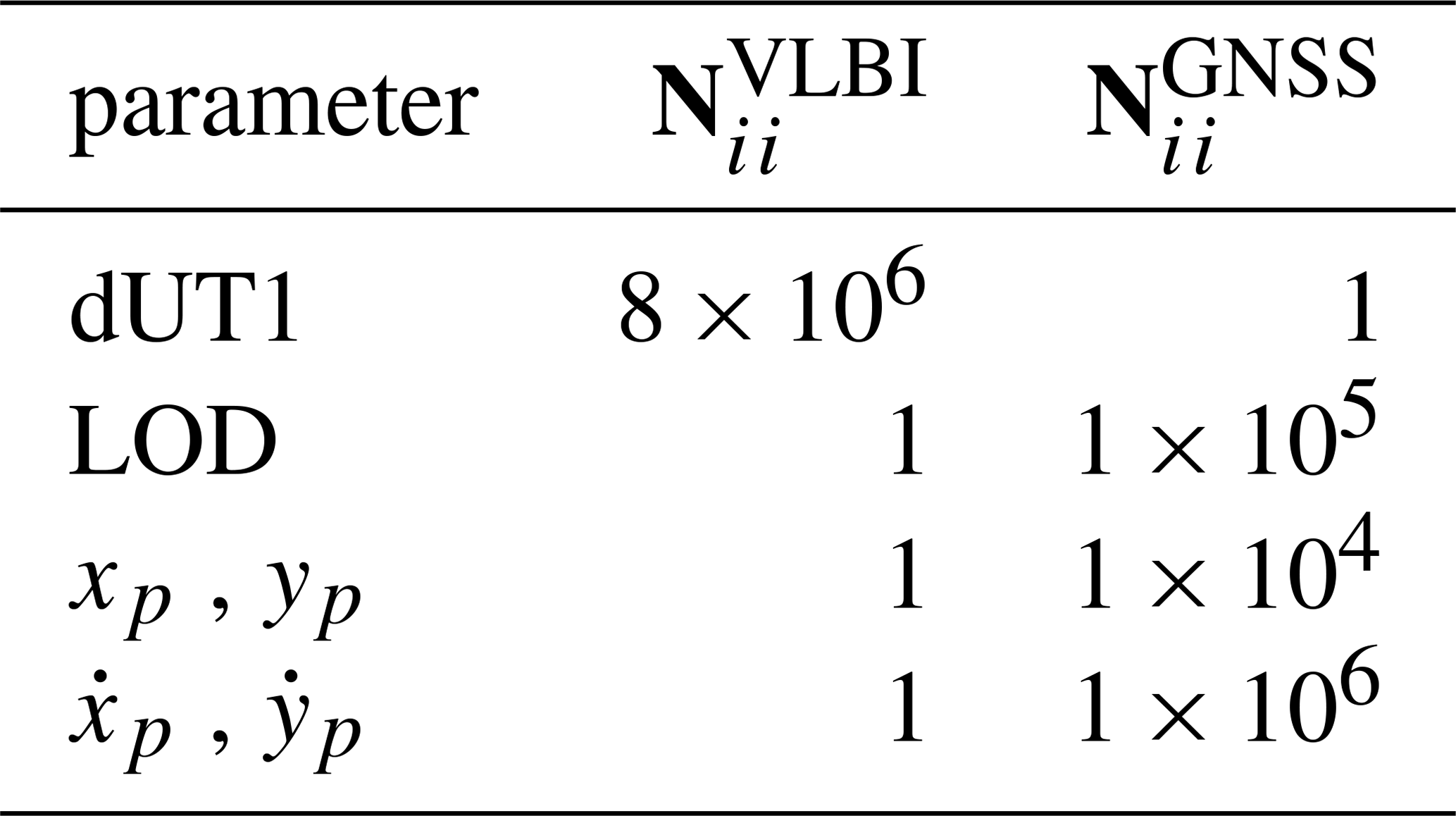
In a common adjustment of all ERPs, correlations between the parameters are taken into account and unbiased ERP estimates can be obtained. The contribution of a technique to one specific parameter is mainly defined by the corresponding diagonal element of the NEQ matrix N. In the following, the ratio of the VLBI and GNSS NEQ diagonal elements is used to identify a dominant technique for each parameter. In the shown time interval, the overall mean value of for station coordinates is about , which proofs the weakness of the VLBI network compared to the much more dense GNSS network. The ability of each technique to determine ERPs and their rates is summarized in Table 4. Both techniques contribute to the ERPs (diagonal elements are not equal to zero), where dUT1 estimates are governed by VLBI and all other parameters by GNSS.
Table 4Ratio for different parameter groups (mean values in 2018).
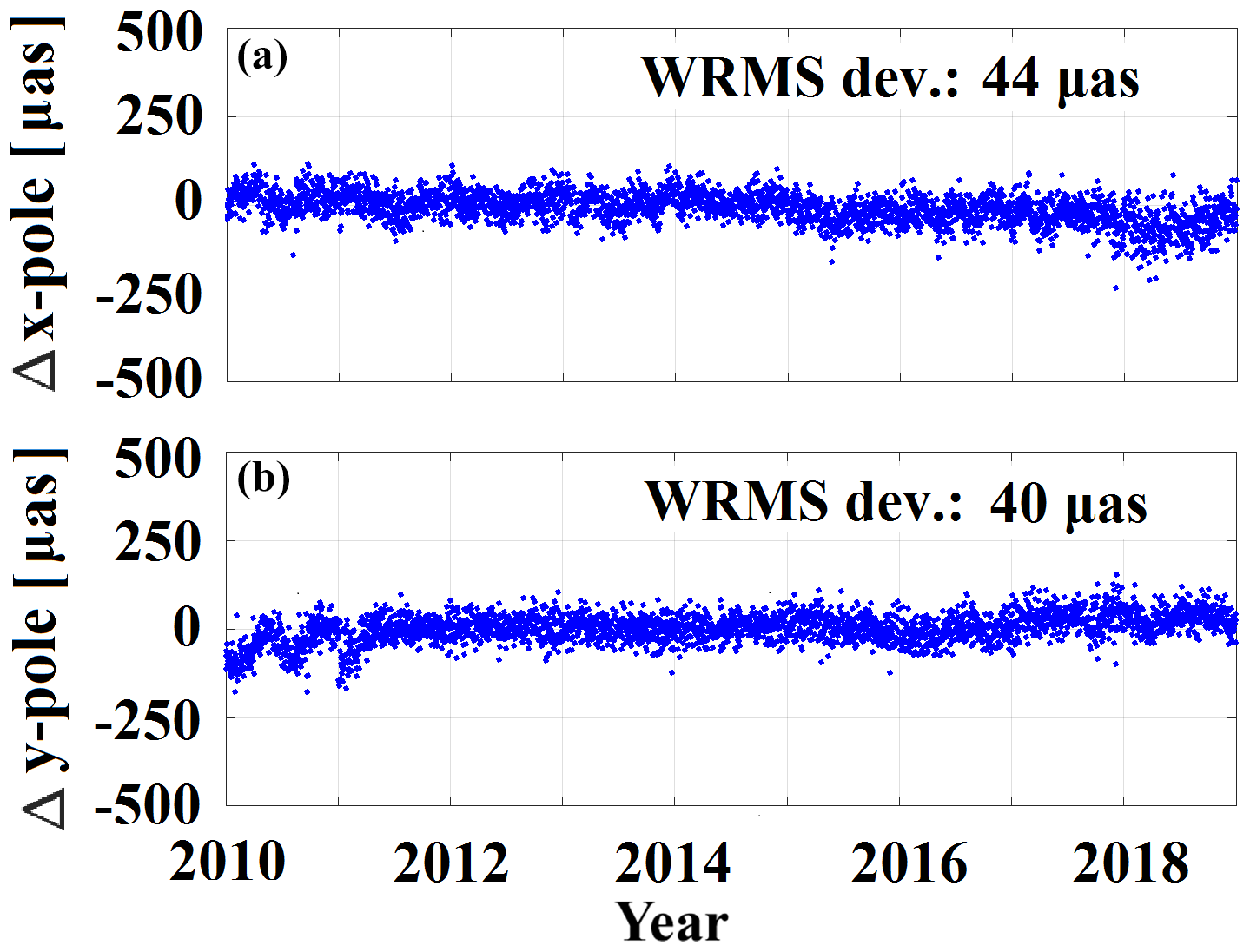
To validate the impact of single-technique GNSS and VLBI Intensive solutions on the combined solution, a single-technique GNSS solution is computed in addition to the single dUT1 estimation given in Fig. 2. The results are shown in Fig. 4 for the terrestrial pole offsets w.r.t. the IERS 14 C04 time series, where dUT1 (not estimated in a GNSS-only solution) has been fixed to the a priori values. Most of the differences are below 50 µas in the terrestrial pole offsets while WRMS deviations of the residuals are at the level of 44 and 40 µas for x- and y-pole, respectively.
3.2 Combination approach
The full set of ERPs is estimated from a daily combination of VLBI Intensive and GNSS Final NEQ systems. This approach is already used at BKG in the framework of the IVS Combination Centre (Bachmann et al., 2016; Bachmann and Thaller, 2017). In a first step, the NEQ systems from both techniques are transformed to common epochs. Thereby, in the case of the terrestrial pole offsets and their rates, a linear epoch transformation can be used. In contrast to this, dUT1 and LOD require a 3-step epoch transformation procedure (Bloßfeld et al., 2014). Since dUT1 and LOD are affected by tidal sub-daily signals, these variations must be reduced from the dUT1 and LOD values. Afterwards, the parameters can be transformed linearly to their new epochs. Finally, the so called regularisation correction at the new epoch must be added back to the dUT1 and LOD values. In this approach, the session-specific VLBI Intensive ERP epochs (midpoint of the 1 h session interval) are transformed to noon epochs, the reference epoch of the the GNSS Finals. Additionally, a consistent NEQ system (N, y, lTPl) is established by a transformation of the a priori values of the parameters in the GNSS final NEQ to those of the parameters in the VLBI Intensive NEQ (Bloßfeld, 2015):
where N is the NEQ matrix, y is the right-hand-side vector, is the difference of the a priori values, Δx is the parameter correction term and (lTPl) is the weighted square sum of the “observed–computed” vector.
In the second step, the both technique-specific NEQs are stacked with equal weights:
The process yields a constraint-free combined NEQ system which is sensitive to the full set of ERPs and their rates. The datum is defined by fixing all station coordinates to their a priori values obtained from ITRF2014 (Altamimi et al., 2016).
In the last step, the combined NEQ system is inverted and solved for the estimated parameters , with
Note that the vector of estimates includes explicitly obtained ERPs and their rates.
The combination results are shown in Fig. 5 (terrestrial pole offsets, dUT1). The ERP variations are compared with the IERS 14 C04 time series and the respective differences are plotted with their WRMS deviations. The results are highlighted w.r.t. the corresponding VLBI Intensive session. The obtained dUT1 estimates demonstrate an improvement of approximately 8 % in comparison to the VLBI Intensive single-technique solution (shown in Fig. 2) besides a reduction of the isolated outliers during 2018 in INT1 and INT2.
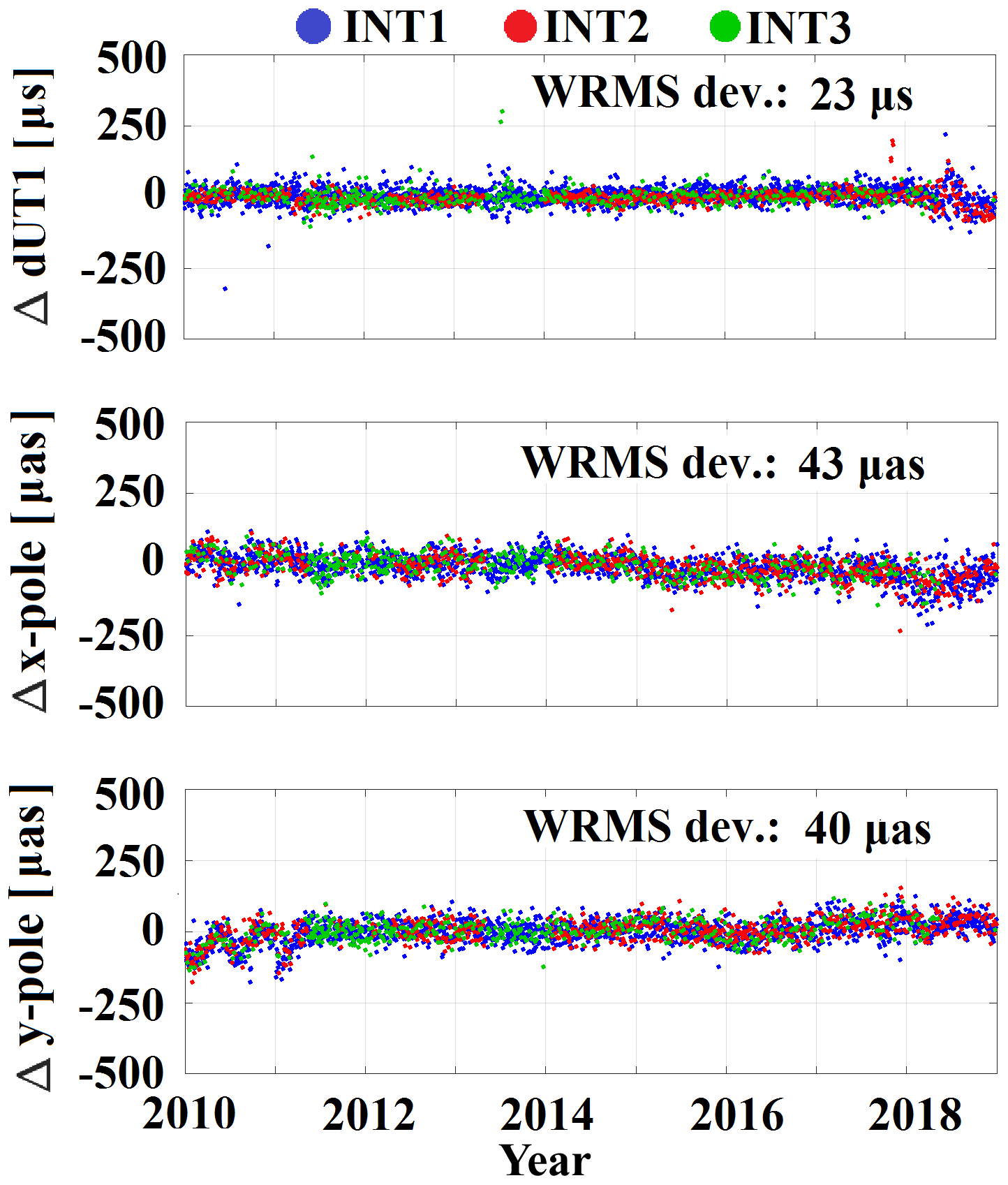
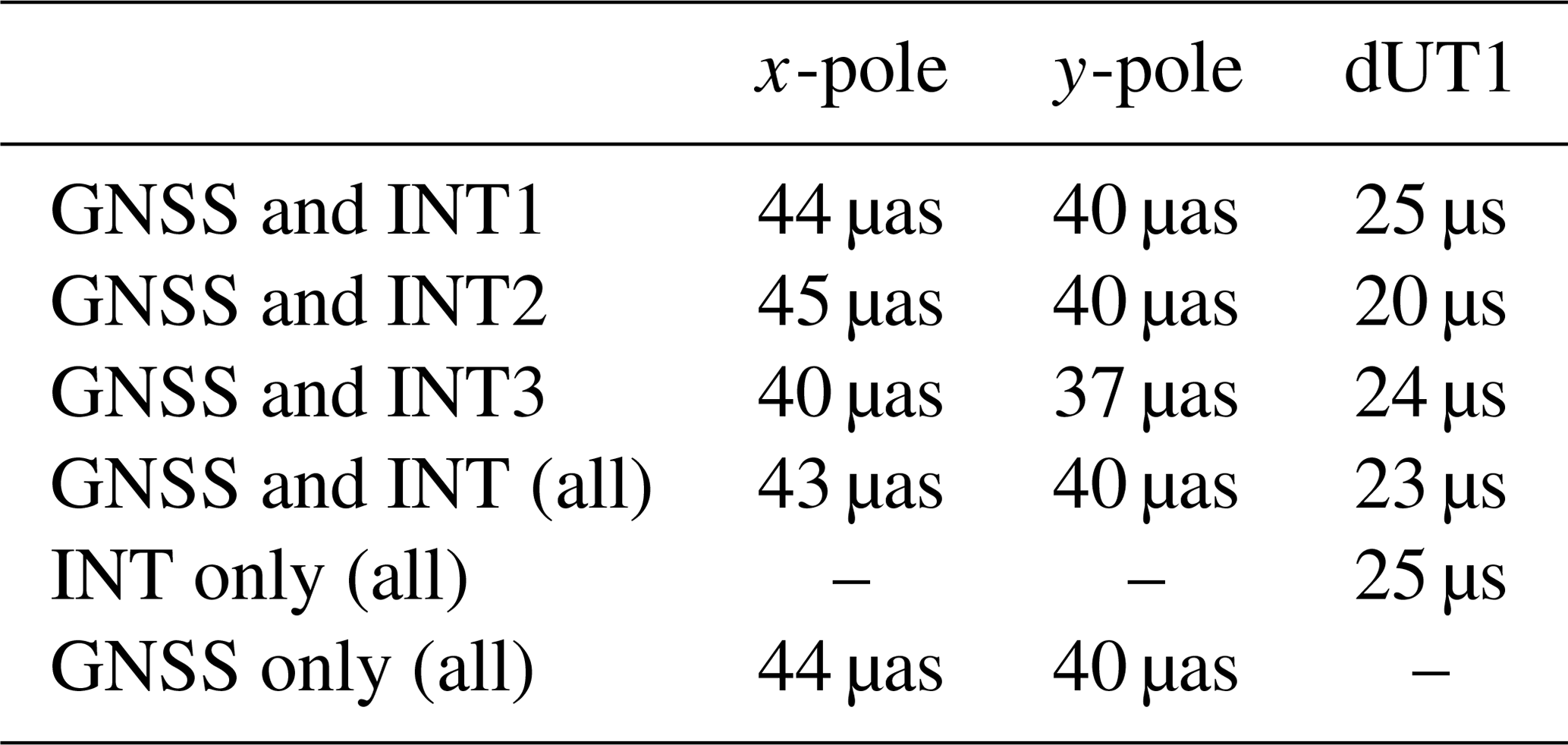
An improvement of the dUT1 estimates (a reduction from 25 to 23 µs) can be seen in the combined solution. While the combined estimation of dUT1 is supported by LOD variations from the GNSS information, the terrestrial pole offset estimates are predominantly based on the GNSS Finals. Thus, the quantities of the x- and y-polar motion are only slightly affected in comparison with the single-technique GNSS Final solution (Fig. 4). In accordance with the VLBI Intensive epochs, the combined pole offset variations are splitted in three time series in order to determine WRMS deviations. Table 5 shows a compilation of the WRMS deviations achieved by the combination and the corresponding single solutions. In particular, the pole offset variations in the y-component are retained in the combined solution. In comparison to the single-technique solution, an influence of the combined solution, however, can be seen in the x-component (reduction from 44 to 43 µas). In addition, the WRMS deviation of the dUT1 estimates could be reduced by the combination process from 25 to 23 µs.
Table 5Comparison of the GNSS/VLBI combination results with the IERS 14 C04 time series: WRMS deviation of residuals.
Better estimates achieved in the combination suggest the enhanced stability of the NEQ system from both geodetic techniques. Thereby the combined solution is not deviated by constraining single parameters to their a priori values and an estimation of the full set of ERPs becomes possible. As the GNSS Final solutions are clearly dominating the combined solution, the question arises if a re-weighting of the NEQs (in particular a down-weighting of GNSS w.r.t. VLBI) could be a suitable step for a further improvement of the combined solution.
The present study focuses on the combination of VLBI and GNSS NEQs for the consistent estimation of a full set of ERPs in one common adjustment. The applied combination procedure is assessed by means of NEQs of the VLBI Intensive sessions provided by BKG and GNSS Finals provided by ESA. The comparison of the test results with the official IERS C04 time series clarifies an improvement of the combined NEQ system. Technique-dependent variations visible in the single-technique solutions could be reduced. Because C04 as the conventional reference for comparing ERP time series entails suboptimal results, further work will focus on spline-interpolated quaterly solutions from IVS combination center as dUT1 reference.
On its initial development stage, the applied combination procedure demonstrates the feasibility of a low-latency combined ERP product. A small improvement can be seen for dUT1 as well as for the x-component of the terrestrial pole offsets. In an extended approach, a deliberate estimation of corrections for the station positions is expected to benefit the ERP estimates. One challenge of this extended approach will be the issue of local ties between VLBI and GNSS sites. Since local ties are unavailable for the station Ishioka (no GNSS receiver available), a combined solution including station coordinates is currently not feasible, as we have to rely on all available VLBI Intensive sessions in order to estimate a continuous daily ERP time series. In spite of the absence of GNSS receivers at some VLBI stations, the GNSS network enables a wider global coverage as well as a high number of observations. For this reason, the combined NEQ system is governed by a considerably large GNSS influence. The combination process can be further improved by using technique-dependent weights in order to balance the GNSS contribution against VLBI. This study intends to set up a scenario for a generation of a rapid ERP time series with low latency. Unfortunately, the GNSS analysis centers currently provide only parameter estimates from the Rapid GNSS analysis but no NEQs or solution equation systems in SINEX files. The GNSS Rapid product is available within 1 d after the last observation, i.e., five times faster than the GNSS Final solutions, but with a comparable accuracy. Therefore, the latency of the combined ERPs could be reduced to a few days if SINEX files would be provided routinely along with the GNSS Rapid products.
All SINEX files of VLBI Intensive sessions are used from the BKG IVS AC (ftp://ivs.bkg.bund.de/pub/vlbi/ivsproducts/int_sinex/bkg2014a, last access: 27 November 2019), all SINEX files of GNSS Finals are used from the ESA IGS AC (ftp://cddis.gsfc.nasa.gov/pub/gps/products, last access: 27 November 2019).
HH and AK developed the software components for the data processing scheme on. In addition HH performed the experiment and evaluated the data. MB developed the software components for stacking, constraining and inverting the NEQ systems on the base of FORTRAN scripts. He additionally gave ideas and suggestions for the study. AG is member of the BKG IVS AC and responsible for generation of the VLBI Intensive SINEX files. DT gave suggestions and instructions for the experimental part. All authors contributed to the manuscript.
The authors declare that they have no conflict of interest.
This article is part of the special issue “European Geosciences Union General Assembly 2019, EGU Geodesy Division Sessions G1.1, G2.4, G2.6, G3.1, G4.4, and G5.2”. It is a result of the EGU General Assembly 2019, Vienna, Austria, 7–12 April 2019.
This work is partly supported by the ESA project “Independent generation of Earth Orientation Parameters”, Contract No. 4000120430/17/D/SR. This work is partly supported by the project “Independent generation of Earth Orientation Parameters” (ESA-EOP).
This research has been supported by the European Space Agency (ESA), contract no. 4000120430/17/D/SR.
This paper was edited by Johannes Boehm and reviewed by Axel Nothnagel and two anonymous referees.
Altamimi, Z., Rebischung, P., Métivier, L., and Collilieux, X.: ITRF2014: A new release of the International Terrestrial Reference Frame modeling nonlinear station motions, J. Geophys. Res.-Sol. Ea., 121, 6109–6131, https://doi.org/10.1002/2016JB013098, 2016. a
Bachmann, S. and Thaller, D.: Adding source positions to the IVS combination – First results, J. Geodesy, 91, 743–753, https://doi.org/10.1007/s00190-016-0979-5, 2017. a
Bachmann, S., Thaller, D., Roggenbuck, O., Lösler, M., and Messerschmitt, L.: IVS contribution to ITRF2014, J. Geodesy, 90, 631–654, https://doi.org/10.1007/s00190-016-0899-4, 2016. a
Baver, K. D., Behrend, D., and Armstrong, K. L.: International VLBI Service for Geodesy and Astrometry 2015+2016 Biennial Report, NVI, Inc., Greenbelt, Maryland, 2017. a
Bizouard, C., Lambert, S., Becker, O., and Richard, J. Y.: Combined solution C04 for Earth Orientation Parameters consistent with International Terrestrial Reference Frame 2014, available at: ftp://hpiers.obspm.fr/iers/eop/eopc04_05/C04.guide.pdf (last access: 27 November 2019), 2017. a
Bizouard, C., Lambert, S., Gattano, C., Becker, O., and Richard, J.: The IERS EOP 14C04 solution for Earth orientation parameters consistent with ITRF 2014, J. Geodesy, 93, 621–633, https://doi.org/10.1007/s00190-018-1186-3, 2019. a
Bloßfeld, M., Seitz, M., and Angermann, D.: Non-linear station motions in epoch and multi-year reference frames, J. Geodesy, 88, 45–63, https://doi.org/10.1007/s00190-013-0668-6, 2014. a
Bloßfeld, M.: The key role of Satellite Laser Ranging towards the integrated estimation of geometry, rotation and gravitational field of the Earth, Dissertation der Ingenieurfakultät Bau Geo Umwelt der Technischen Universität München, München 2015, ISBN 978-3-7696-5157-7, 2015. a, b
Dach, R. and Jean, Y.: International GNSS Service Technical Report 2012, IGS Central Bureau, Astronomical Institute, University of Bern, Bern, 2013. a
Dermanis, A. and Mueller, I.: Earth rotation and network geometry optimization for very long baseline interferometers, B. Géod., 52, 131–158, https://doi.org/10.1007/BF02521695, 1978. a
Haas, R., Hobiger, T., Kurihara, S., and Hara, T.: Ultra-rapid earth rotation determination with VLBI during CONT11 and CONT14, J. Geodesy, 91, 831–837, https://doi.org/10.1007/s00190-016-0974-x, 2017. a
IERS Rapid Service/Prediction Centre: available at: https://maia.usno.navy.mil/, last access: 27 November 2019. a
Leek, J.: The application of impact factors to scheduling VLBI Intensive sessions with twin telescopes, Inaugural – Dissertation der Landwirtschaftlichen Fakultät der Rheinischen Friedrich-Wilhelms-Universität zu Bonn, Bonn 2014, available at: http://hss.ulb.uni-bonn.de/2015/3905/3905.pdf (last access: 27 November 2019), 2014. a
Nilsson, T., Karbon, M., Soja, B., Raposo-Pulido, V., Heinkelmann, R., Mora-Diaz, J., Lu, C., Liu, L., and Schuh, H.: Rapid UT1 Estimation by Combining VLBI Intensives with GNSS, in: IAG 150 Years: Proceedings of the IAG Scientific Assembly in Postdam, Germany, 2013, (International Association of Geodesy Symposia; 143), edited by: Rizos, C. and Willis, P., Springer International Publishing, Cham, 521–526, 2013. a
Nothnagel, A. and Schnell, D.: The impact of errors in polar motion and nutation on UT1 determinations from VLBI Intensive observations, J. Geodesy, 82, 863–869, https://doi.org/10.1007/s00190-008-0212-2, 2008. a, b
Petit, G. and Luzum, B. (Eds.): IERS Conventions 2010, IERS Technical Note No. 36, Frankfurt am Main: Verlag des Bundesamts für Kartographie und Geodäsie, 132–131, 2010. a
Schmid, R.: Zur Kombination von VLBI und GNSS, Dissertation der Fakultät für Bauingenieur- und Vermessungswesen der Technischen Universität München, München, 2009. a
Seitz, M.: Kombination geodätischer Raumbeobachtungsverfahren zur Realisierung eines terrestrischen Referenzsystems. Dissertation der Fakultät für Forst-, Geo- und Hydrowissenschaften der Technischen Universität Dresden, Dresden 2009, ISBN 978-3-7696-5042-6, 2009. a
Seitz, M.: Comparison of Different Combination Strategies Applied for the Computation of Terrestrial Reference Frames and Geodetic Parameter Series, in: The 1st International Workshop on the Quality of Geodetic Observation and Monitoring Systems (QuGOMS'11), International Association of Geodesy Symposia, edited by: Kutterer, H., Seitz, F., Alkhatib, H., and Schmidt, M., Springer, Cham, 140, 2012. a
Subirana, J. S., Juan Zornoza, J. M., and Hernandez-Pajares, M.: GNSS DATA PROCESSING, Volume I: Fundamentals and Algorithms, Contactivity bv, Leiden, the Netherlands, ISBN 978-92-9221-886-7, European Space Agency, 2013. a, b
Steigenberger, P.: Accuracy of Current and Future Satellite Navigation Systems, Von der Ingenieurfakultät Bau Geo Umwelt der Technischen Universität München zur Verleihungder Lehrbefähigung für das Fachgebiet Geodätische Raumverfahrengenehmigte Habilitationsschrift, München, 2014. a
Thaller, D.: Inter-technique combination based on homogeneous normal equation systems including station coordinates, Earth orientation and troposphere parameters, Dissertation der Fakultät für Bauingenieur- und Vermessungswesen der Technischen Universität München, München 03/2008, ISSN 1610-0956, 2008. a
Thaller, D. and Bachmann, S.: The IERS Retreat: How to improve Earth Rotation products?, in: Proceedings of the Journées 2013 “Systèmes de Référence Spatio-Temporels”, Observatoire de Paris, edited by: Capitaine, N., 175–180, ISBN 978-2-901057-69-7, 2015. a
Thaller, D., Tesmer, V., Dach, R., Krügel, M., Rothacher, M., and Steigenberger, P.: Combining VLBI Intensive with GPS Rapid solutions for deriving a stable UT time series, in: the 5th IVS General Meeting Proceedings, St. Petersburg, 8–13, 2008. a, b
Thorandt, V., Engelhardt, G., Ullrich, D., Artz, T., Halsig, S., Holst, C., Iddink, A., Jaron, F., and Nothnagel, A.: BKG/IGGB VLBI Analysis Center, in: International VLBI Service for Geodesy and Astrometry 2015+2016 Biennial Report, edited by: Baver, K. D., Behrend, D., and Armstrong, K. L., NASA/TP-2017-219021, 2017. a
Villiger, A. and Dach, R.: International GNSS Service, Technical Report, Astronomical Institute, University of Bern, Bern, 2018. a